


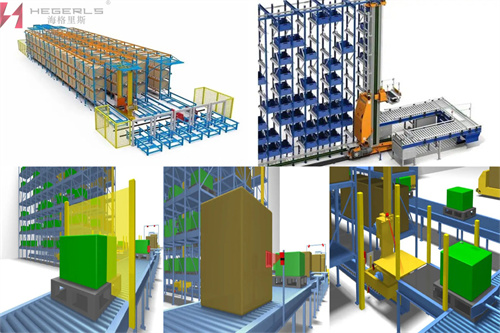
د اتوماتیک درې اړخیز ګودام اصلي عملیاتي ساحې د ترلاسه کولو ساحه، د ترلاسه کولو ساحه، د اخیستلو ساحه او د تحویل ساحه ده. د عرضه کونکي څخه د تحویلي نوټ او توکو ترلاسه کولو وروسته ، د ګودام مرکز به نوي داخل شوي توکي د ترلاسه کونکي ساحې کې د بارکوډ سکینر له لارې ومني. د تصدیق کولو وروسته چې د تحویلي یادداشت د توکو سره مطابقت لري ، توکي به نور پروسس شي. د توکو برخه په مستقیم ډول د تحویلي ساحې ته لیږدول کیږي ، کوم چې د ډول ډول توکو پورې اړه لري؛ د توکو بله برخه د ذخیره کولو ډول توکو پورې اړه لري، کوم چې د ګودام کولو ته اړتیا لري، دا د راټولولو ساحې ته ننوځي. انتخاب په اتوماتيک ډول د اتوماتیک ترتیب کولو او رسولو سیسټم او د اتومات لارښود سیسټم لخوا بشپړ شوی. د ترتیب کولو وروسته، توکي د اتوماتیک درې اړخیز ګودام ته ننوځي. کله چې توکي تحویلي ته اړتیا وي ، د تحویلي یادداشت کې د ښودلو سره سم ، توکي به د اتوماتیک ترتیب کولو او رسولو تجهیزاتو له لارې اړونده بار کولو لاین ته واستول شي. وروسته له دې چې توکي بسته شي، دوی به بار او تحویل شي. بیا څنګه د اتوماتیک درې اړخیز ګودام عملیات تنظیم کړئ؟ اوس راځئ چې د لیدلو لپاره د هیجرز ګودام تعقیب کړو!

په عموم کې، په عام ډول کارول شوي تجهیزات د ترلاسه کولو، ګودام کولو او بهر کولو لپاره په لاندې ډول دي:
د ترلاسه کولو عملیات
توکي به په کانتینرونو کې د ریل یا سړک له لارې ټاکل شوي ځای ته لیږدول کیږي، او کانټینرونه به د کانټینر عملیاتي تجهیزاتو (پشمول د کانټینر کرین، ټایر ډول ګینټري کرین، د ریل ډول ګینټري کرین، او نور) لخوا پورته شي. عموما ، په کانټینر کې توکي لومړی په تخته کې ایښودل کیږي ، او بیا توکي د ګودام تفتیش لپاره د فورک لیفټ لخوا د تختې سره یوځای ایستل کیږي.

د ګودام عملیات
وروسته له دې چې توکي د ګودام په دروازه کې معاینه کیږي ، دوی به د کمپیوټر مدیریت ذخیره کولو سیسټم لخوا صادر شوي لارښوونو سره سم په ټاکل شوي تخته کې کیښودل شي. عموما، فورک لیفټ، پیلټ کیریر، لیږدونکی او اتوماتیک لارښود کیریر په تخت کې د توکو ځای پرځای کولو لپاره یوځای کارول کیږي. لیږدونکی د بیلټ لیږدونکی یا رولر لیږدونکی کیدی شي. په عموم کې، لیږدونکی او AGV د کمپیوټر لخوا کنټرول کیږي.
وروسته له دې چې توکي په تخته کې کیښودل شي ، د لین وی سټیکر به د عمل لارښوونو سره سم په ټاکل شوي ریک کې توکي واچوي ، او بیا د لین وی سټیکر به د لین لارې په اوږدو کې اوږدمهاله پرمخ ځي. په ورته وخت کې، تخته به د سټیکر کالم سره پورته شي. د لین وی سټیکر د عملیاتو او پورته کولو پرمهال ، د پتې معلومات به په دوامداره توګه کمپیوټر ته بیرته ورکړل شي. په ورته وخت کې ، کمپیوټر به د لین ویز سټیکر ته مختلف لارښوونې واستوي ترڅو د لین وی سټیکر عملیاتي پروسې کنټرول کړي ، په نهایت کې ، توکي په شیلف کې ټاکل شوي موقعیت کې واچوي.
دلته ، هیګرلز لوی تصدۍ ته هم یادونه کوي چې په درې اړخیز ګودام کې د لوړې کچې المارۍ او سټیکرونه د معیاري محصولاتو ترلاسه کولو لپاره اسانه دي؛ په هرصورت ، د راتلوونکي او وتلو لیږدونکي سیسټم باید په ځانګړي ډول د ګودام د ترتیب ، د راتلوونکي او وتلو عملیاتو مینځپانګې ، د راتلونکو او وتلو سټیشنونو شمیر ، او د انحراف او ادغام اړتیاو سره سم پلان او ډیزاین شي. د راتلونکي او وتلو لیږدونکي سیسټم پلان کول او ډیزاین د اتوماتیک درې اړخیز ګودام پلي کیدو کلیدي ده. د راتلونکي او وتلو لیږدونکي سیسټم پلان کول او ډیزاین د پیلټ عمومي ابعاد او جوړښت سره نږدې تړاو لري ، د بارولو او بارولو میتودونه ، د اړوند لوژستیک تجهیزاتو اتومات کنټرول او کشف میتودونه.

بهرنی عملیات
د توکو رسولو او د ګودام عملیات د ورته کنټرول سیسټم لخوا کنټرول کیږي، او د عملیاتو پروسه برعکس ده.
په اوس وخت کې، د ځانګړو کاري ماشینونو مختلف ډولونه شتون لري، لکه د راتلونکو او وتلو لیږدونکي، چې د لوی او پیچلي اتوماتیک ګودامونو یوه مهمه برخه ده. دوی د سټیکرونو او نورو ماشینونو سره وصل شوي ترڅو د توکو لوړ سرعت ترانسپورت ترلاسه کړي. که څه هم د هر کارونکي راتلونکي او وتلو لیږدونکي سیسټمونه مختلف دي ، دوی لاهم د مختلف ډولونو لیږدونکو څخه جوړ شوي دي (د زنځیر لیږدونکی ، رولر لیږدونکی ، د زنځیر رولر میز مرکب لیږدونکی ، د زنځیر رولر میز مرکب لیږدونکی د رولر میز رسولو فعالیت سره) او د دوی لومړني ماډلونه .
د پوسټ وخت: اګست-10-2022